ROBOTICA
- Un robot no puede actuar contra un ser humano o, mediante la inacción, que un ser humano sufra daños.
- Un robot debe de obedecer las ordenes dadas por los seres humanos, salvo que estén en conflictos con la primera ley.
- Un robot debe proteger su propia existencia, a no ser que esté en conflicto con las dos primeras leyes.
Cirugía robótica

Cocina robótica

Ciberagricultores

Dron mensajero

1. Administración de nóminas
2. Migración de datos
3. Elaboración y envío de informes
4. Gestión de la relación con el cliente
5. Contratación de personal
6. Procesamiento de pedidos
7. Control y administración del gasto
8. Gestión y mantenimiento de proveedores
9. Apoyo y ayuda TI
10. Categorización de productos

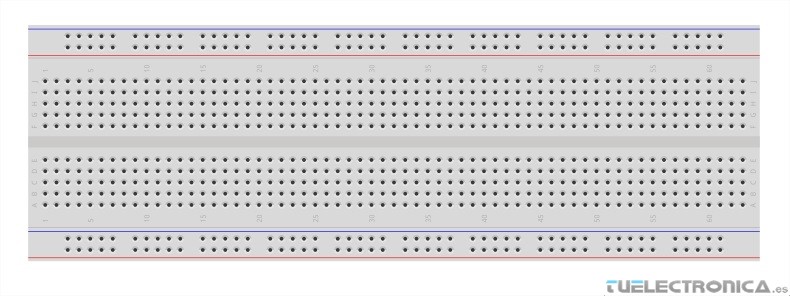
QUE ES UNA PROTOBOARD
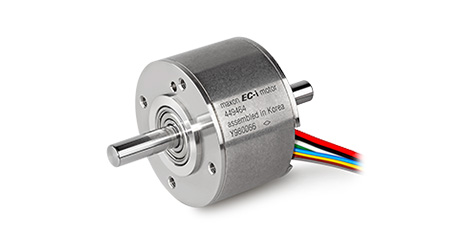
Los motores brushless planos EC son la elección perfecta en numerosas aplicaciones, gracias a su forma plana. El minucioso y sencillo diseño hace posible una fabricación automatizada, lo que revierte en un precio económico. Gracias a su circuito magnético optimizado, los motores brushless EC-i con bobinado con hierro poseen una gran densidad de par y presentan, sin embrago, un reducido par de retención. El rotor interior multipolar lo hace un motor brushless muy dinámico.
Programa Heavy Duty
La gama de productos Heavy Duty, de alta resistencia de maxon está especialmente diseñada para condiciones de uso extremadamente hostiles y temperaturas de más de 200 ºC. Concebidos para responder a altas exigencias, estos motores brushless abren nuevas perspectivas de aplicación, gracias a su elevado rendimiento (en el aire hasta un 88%, en lubricante superan el 70%) ofrecen las condiciones ideales para aplicaciones alimentadas a batería. Gracias a sus propiedades de funcionamiento sin par de retención, presentan excelentes capacidades de regulación, siendo idóneos para tareas de posicionamiento de alta precisión, incluso a baja velocidad.

Motores DC maxon DCX
Los motores DC maxon DCX destacan por una insuperable densidad de potencia (par por volumen) y por su absoluta suavidad. Su robusto diseño, junto con su bobinado sin hierro, patentado en todo el mundo, hace que los motores de corriente continua maxon DCX sean altamente dinámicos en casi todos los ámbitos de aplicación. Los potentes motores eléctricos maxon DCX se configuran online con sus correspondientes reductores y encoders y están fabricados en el plazo de once días laborables.

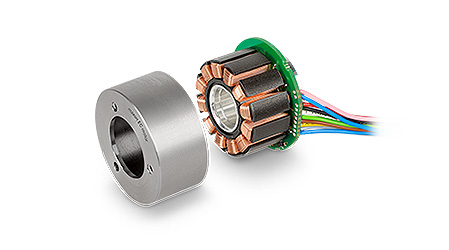
Motores brushless EC frameless flat
Los kits de motor eléctrico sin bastidor se componen únicamente de rotor y estátor, no disponen ni de cojinete ni de eje del motor. Con un diámetro exterior de solo entre 43 y 90 mm son extremadamente compactos. El diseño plano, los elevados pares y el amplio espacio para los pasos de cable facilitan su integración en la aplicación.
CABLES DE CONEXIÓN
Es un tipo de socket rectangular de plástico que a su vez tiene en su interior dos o más sockets metálicos con un espacio entre ellos de 0.2 mm hechos de fósforo-bronce, de una aleación de cobre-níquel, de estaño o de latón y con un color dorado o cromado, de tal manera que cuando se introducen y se empujan hacia los pines de un circuito, éstos cierran el circuito cubriendo completamente los pines, resultando en una conexión temporal.
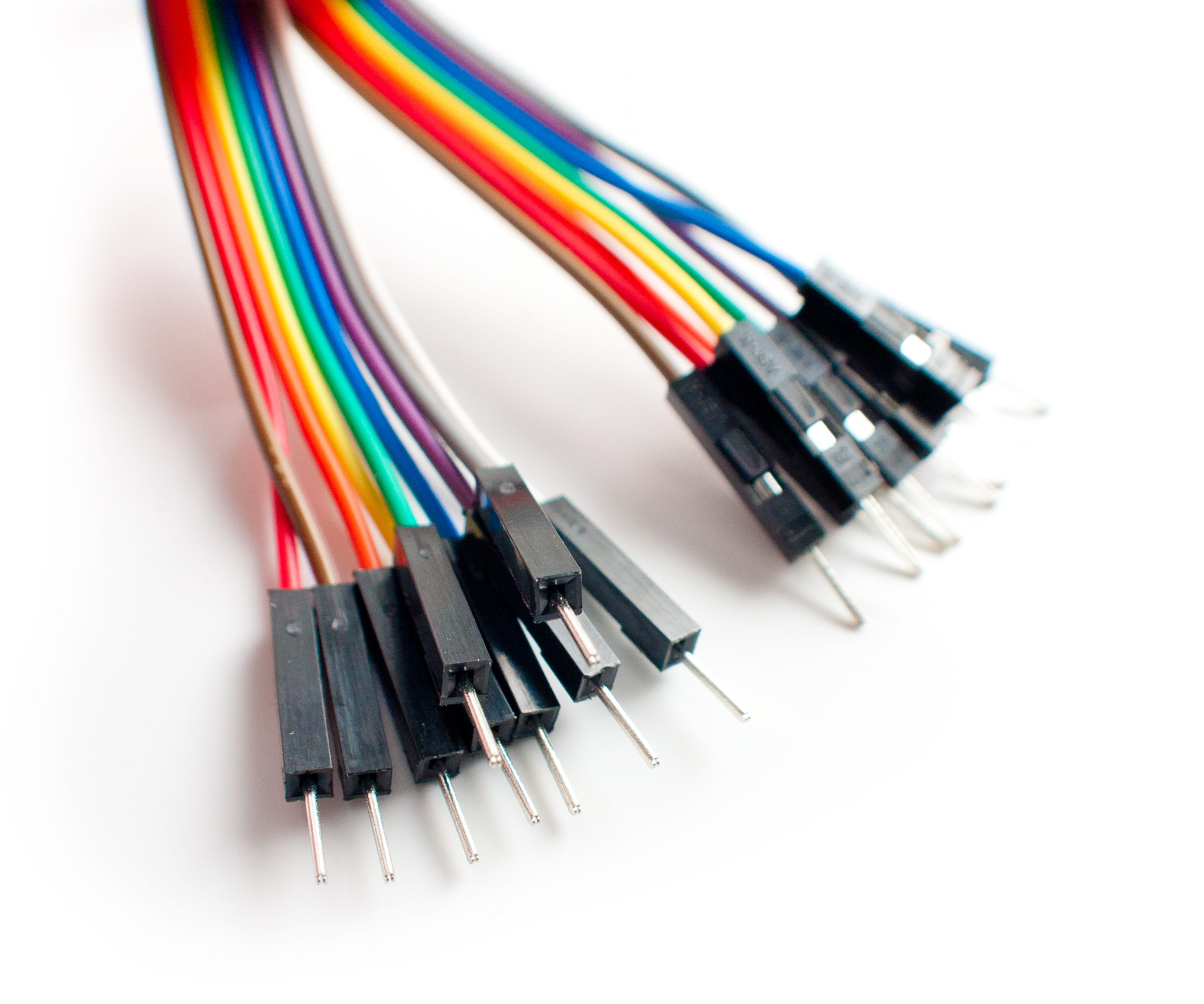
¿PORQUÉ VIENEN PEGADOS? Vienen todos pegados por si quieres hacer algún proyecto sin separar los cables
DIFERENTES POSICIONES: en dos posiciones es empleado especialmente para interconectar dos terminales macho separados entre sí 2.54m (0.1"). Ideal para la creación de configuraciones, combinaciones o contraseñas por hardware, para reemplazar dip-switches, para unir señales, puenteo, etc. Puede usarse junto con regleta de macho 40 pines.
BATERÍAS PARA ROBÓTICA
Una batería es un elemento eléctrico que transforma energía química en energía eléctrica, y viceversa. A esta transformación se la denomina proceso electroquímico.
Se componen de un conjunto de elementos individuales (o celdas) conectados en serie, cada uno de los cuales tiene, si está cargado, un voltaje nominal, que oscila entre 1,2 y 3,6 V.
En el mercado se comercializan elementos con diversas capacidades, que se expresan en el cuerpo de la batería como 500 mAh, 1700 mAh, 3300 mAh, etc. Una batería de 1000 mAh es capaz de entregar una corriente de 1000 mA (1A) durante una hora, ó 10 A durante la décima parte de una hora (en teoría, porque muchas baterías no soportan un régimen tan alto de descarga), etc.
Baterías de Plomo-ácido

Cuando la batería está descargada, los dos electrodos se convierten en sulfato de plomo y el electrolito se convierte en agua (por esta razón las baterías de plomo descargadas se pueden congelar más fácil). Los diseños modernos tienen un electrolito gelificado.
Baterías de gel

Baterías de Niquel-Cadmio (Ni-Cd)
Una batería recargable de Ni-CD (o NiCd) está formada por una placa positiva de hidróxido de níquel y una placa negativa de hidróxido de cadmio. Ambas placas están separadas por un electrolito, compuesto por una solución acuosa de potasio cáustico, contenida dentro de un tejido poroso.

Efecto inversión de polaridad: Una batería de Ni-Cd no debe ser descargada por debajo de su tensión mínima, que es de 1,1 V por elemento, ya que se corre el peligro de que se produzca una inversión de polaridad en uno o varios de sus elementos. Esto ocurre con frecuencia cuando las baterías se descargan por debajo de su valor mínimo. La inversión de polaridad se produce a causa de un cambio químico, que causa daño en el interior de los elementos y que en general no es reversible.
Batería de níquel e hidruro metálico (Ni/MH)

Las baterías de níquel e hidruro metálico tienden a tener una mayor capacidad que las Ni-Cd y sufren bastante menos el efecto memoria.
Las baterías de níquel e hidruro metálico son más amigables con el medio ambiente. Pueden almacenar un 30% más de energía que una de Ni-Cd equivalente, y por tanto, la carga dura más tiempo.
Baterías de Ni-Cd frente a Ni/MH
Como ventajas fundamentales, las baterías de Ni/MH tienen una mayor densidad de carga (capacidad/peso superior, aproximadamente 40%-70% más capacidad); no contienen cadmio (tóxico) y aparentemente no tienen efectos de pérdida de capacidad por mal uso o de formación de dendritas (que se forman en las baterías de Ni-Cd al producirse la inversión de la polaridad de la celda).
Las baterías de Ni/MH tienen una resistencia interna superior que limita su uso en aplicaciones de alta potencia, si bien la industria ha ido solucionando esto al ofrecer nuevos tipos que igualan en capacidad de descarga a las celdas del mismo tamaño de Ni-Cd.
Otro inconveniente es que las Ni/MH no admiten una carga tan rápida como las de Ni-Cd, bajo riesgo de deteriorarlas.
Batería de iones de litio (Li-Ion)

Presentan un alto voltaje por celda; cada unidad proporciona 3,6 voltios, lo mismo que tres celdas de Ni-Cd (1,2 V cada una). Carecen de efecto memoria. Su descarga es lineal, es decir, que durante toda la descarga el voltaje de la batería apenas varía, lo que evita la necesidad de circuitos reguladores. (Se debe tener en cuenta que esto puede ser una desventaja en algunos casos, ya que hace difícil averiguar el estado de carga de la batería.) Los resistores o resistencias eléctricas son elementos que tienen dos terminales y cumplen con la función de ofrecer oposición al paso de la corriente eléctrica.
TIPOS DE RESISTENCIAS
Resistencias o resistores fijos: Las resistencias fijas o resistores son un tipo de resistencia que siempre conservan el mismo valor; el material del que están fabricadas es carbón y otros materiales resistivos que ayudan a controlar la corriente de un circuito; generalmente se les denomina resistencias solamente.

RESISTENCIAS VARIABLES
Las resistencias variables o resistores tienen a su vez diferente tipos:
Potenciómetros
Este tipo de resistencias cambia su valor de acuerdo con el giro de un mando que se ajusta, entre 0 y el valor máximo del elemento. Entre los potenciómetros se tienen diferentes valores máximos, dependiendo su uso: 10 KΩ, 100 KΩ, 1 MΩ, 10 MΩ.
Resistencias variables no lineales

- LDR: son resistencias que cambian el valor dependiendo de la intensidad de luz que les llega, si el ambiente es oscuro el valor de la resistencia es mayor; si la luz del ambiente aumenta el valor de la resistencia baja. Se emplean en sistemas de control de iluminación.
- NTC: son resistencias que cambian su valor dependiendo del nivel de temperatura. Se emplean en diferentes aplicaciones como termostatos, sistemas de control de temperatura y alarmas.
Comentarios
Publicar un comentario